Go to the source code of this file.
Data Structures | |
| struct | SL_Quaternion |
| Quaternion. More... | |
| struct | SL_Vector2 |
| Vector2. More... | |
| struct | SL_Vector3 |
| Vector3. More... | |
| struct | SL_Vector4 |
| Vector4. More... | |
| struct | SL_Uchar2 |
| uchar2 More... | |
| struct | SL_Uchar3 |
| uchar3 More... | |
| struct | SL_Uchar4 |
| uchar4 More... | |
| struct | SL_Matrix4f |
| Matric4x4. More... | |
| struct | SL_Matrix3f |
| Matrix3x3. More... | |
| struct | SL_PoseData |
| struct | SL_PlaneData |
| struct | SL_IMUData |
| IMU Data structure. More... | |
| struct | SL_BarometerData |
| Barometer Data structure. More... | |
| struct | SL_MagnetometerData |
| Magnometer Data structure. More... | |
| struct | SL_TemperatureData |
| Temperature Data structure. More... | |
| struct | SL_SensorData |
| Sensor Data structure. More... | |
| struct | USB_product |
| struct | SL_Resolution |
| Resolution. More... | |
| struct | SL_InitParameters |
| struct | SL_RuntimeParameters |
| struct | SL_DeviceProperties |
| struct | SL_CameraParameters |
| struct | SL_CalibrationParameters |
| struct | SL_SensorParameters |
| Structure containing information about a single sensor available in the current device. More... | |
| struct | SL_CameraConfiguration |
| Structure containing information about the camera sensor. More... | |
| struct | SL_SensorsConfiguration |
| struct | SL_CameraInformation |
| Structure containing information of a single camera (serial number, model, input type, etc.) More... | |
| struct | SL_PositionalTrackingParameters |
| struct | SL_RecordingStatus |
| Recording structure that contains information about SVO. More... | |
| struct | SL_RecordingParameters |
| Sets the recording parameters. More... | |
| struct | SL_StreamingParameters |
| Sets the streaming parameters. More... | |
| struct | SL_StreamingProperties |
| struct | SL_SpatialMappingParameters |
| struct | SL_BatchParameters |
| struct | SL_AI_Model_status |
| contains AI model status. More... | |
| struct | SL_ObjectDetectionParameters |
| struct | SL_ObjectDetectionRuntimeParameters |
| struct | SL_ObjectData |
| struct | SL_CustomBoxObjectData |
| Container to store the externally detected objects. The objects can be ingested using sl_ingest_custom_box_objects() functions to extract 3D information and tracking over time. More... | |
| struct | SL_Objects |
| struct | SL_ObjectsBatch |
| Objects batch structure. More... | |
| struct | SL_Rect |
Macros | |
| #define | WITH_OBJECT_DETECTION 1 |
| #define | MAX_CAMERA_PLUGIN 4 |
| #define | MAX_SUBMESH 1000 |
| #define | MAX_NUMBER_OBJECT 75 |
| #define | MAX_TRAJECTORY_SIZE 200 |
Enumerations | |
| enum | UNITY_PLAN_TYPE |
| enum | SL_HEADING_STATE |
| Heading state enum. More... | |
| enum | USB_DEVICE |
| enum | SL_ERROR_CODE |
| Lists error codes in the ZED SDK. More... | |
| enum | SL_RESOLUTION |
| Represents the available resolution defined in the cameraResolution list. More... | |
| enum | SL_UNIT |
| Lists available unit for measures. More... | |
| enum | SL_COORDINATE_SYSTEM |
| Lists available coordinates systems for positional tracking and 3D measures. More... | |
| enum | SL_CAMERA_STATE |
| List of possible camera state. More... | |
| enum | SL_MODEL |
| Lists compatible ZED Camera model. More... | |
| enum | SL_MEM |
| List available memory type. More... | |
| enum | SL_SENSOR_TYPE |
| List of the available onboard sensors. More... | |
| enum | SL_SENSORS_UNIT |
| List of the available onboard sensors measurement units. More... | |
| enum | SL_SIDE |
| enum | SL_INPUT_TYPE |
| enum | SL_REFERENCE_FRAME |
| Defines which type of position matrix is used to store camera path and pose. More... | |
| enum | SL_SENSOR_WORLD |
| Lists different World frame available More... | |
| enum | SL_TIME_REFERENCE |
| Lists specific and particular timestamps. More... | |
| enum | SL_STREAMING_CODEC |
| List of codec. More... | |
| enum | SL_VIDEO_SETTINGS |
| Lists available camera settings for the ZED camera (contrast, hue, saturation, gain...). More... | |
| enum | SL_MEASURE |
| Lists retrievable measures. More... | |
| enum | SL_VIEW |
| Lists available views. More... | |
| enum | SL_OBJECT_TRACKING_STATE |
| Lists available object tracking state. More... | |
| enum | SL_POSITIONAL_TRACKING_STATE |
| Lists the different states of positional tracking. More... | |
| enum | SL_AREA_EXPORTING_STATE |
| Lists the different states of spatial memory area export. More... | |
| enum | SL_SPATIAL_MAPPING_STATE |
| Gives the spatial mapping state. More... | |
| enum | SL_SPATIAL_MAP_TYPE |
| Lists the types of spatial maps that can be created. More... | |
| enum | SL_MESH_FILTER |
| Lists available mesh filtering intensity. More... | |
| enum | SL_MESH_FILE_FORMAT |
| Lists available mesh file formats. More... | |
| enum | SL_SENSING_MODE |
| Lists available depth sensing modes. More... | |
| enum | SL_DEPTH_MODE |
| Lists available depth computation modes. More... | |
| enum | SL_FLIP_MODE |
| Gives the camera flip mode. More... | |
| enum | SL_COPY_TYPE |
| List available copy operation on Mat. More... | |
| enum | SL_SVO_COMPRESSION_MODE |
| Lists available compression modes for SVO recording. More... | |
| enum | SL_MAT_TYPE |
| List available Mat formats. More... | |
| enum | SL_OBJECT_SUBCLASS |
| Available object subclass, given as hint, when using object tracking an object can change of OBJECT_SUBCLASS while keeping the same OBJECT_CLASS and id (i.e: frame M: MOTORBIKE, frame N:BICYCLE) More... | |
| enum | SL_OBJECT_ACTION_STATE |
| Lists available object action state. More... | |
| enum | SL_DETECTION_MODEL |
| List available models for detection. More... | |
| enum | SL_AI_MODELS |
| Lists available AI moles. | |
| enum | SL_OBJECT_FILTERING_MODE |
| Lists of supported bounding box preprocessing. More... | |
| enum | SL_BODY_FORMAT |
| Lists of supported skeleton body model. More... | |
| enum | SL_BODY_PARTS_POSE_18 |
| semantic of human body parts and order of ObjectData::keypoint. | |
| enum | SL_BODY_PARTS_POSE_34 |
| semantic of human body parts and order of ObjectData::keypoint for BODY_FORMAT::POSE_34. | |
| enum | SL_OBJECT_CLASS |
| Lists available object class. More... | |
Variables | |
| const int | SL_VIDEO_SETTINGS_VALUE_AUTO = -1 |
| enum SL_HEADING_STATE |
Heading state enum.
| enum SL_ERROR_CODE |
Lists error codes in the ZED SDK.
| enum SL_RESOLUTION |
Represents the available resolution defined in the cameraResolution list.
| enum SL_UNIT |
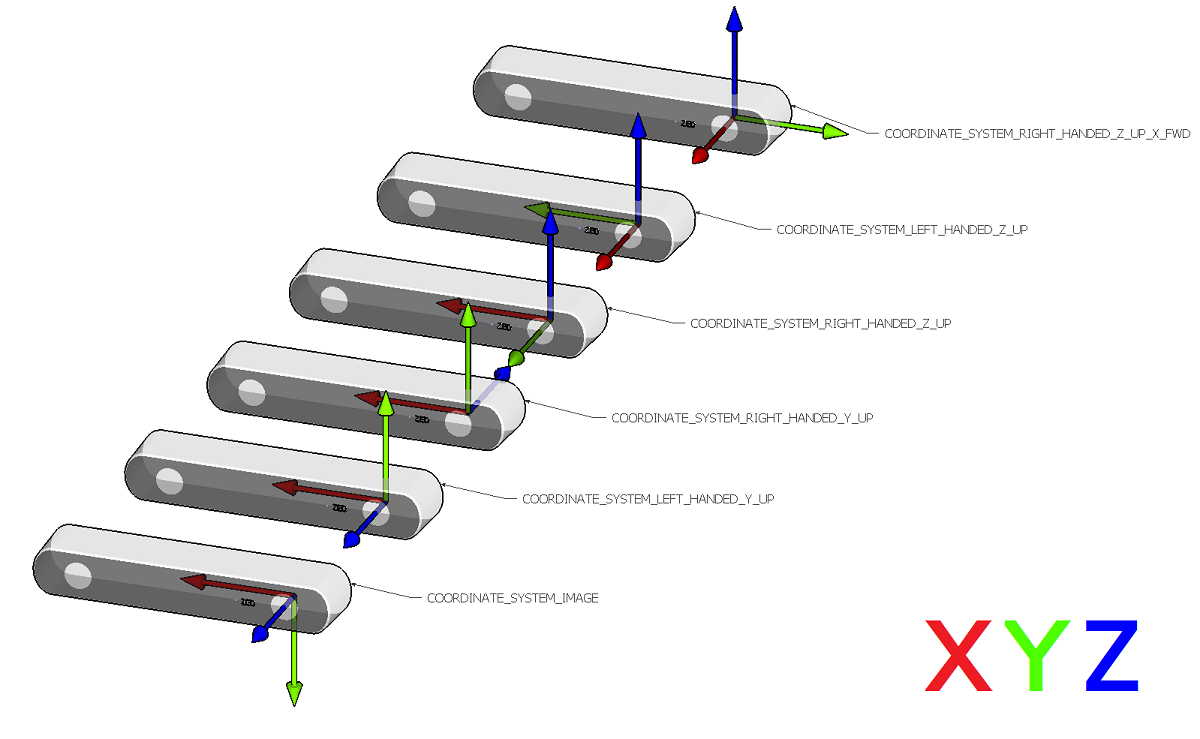
| enum SL_COORDINATE_SYSTEM |
Lists available coordinates systems for positional tracking and 3D measures.
| Enumerator | |
|---|---|
| SL_COORDINATE_SYSTEM_IMAGE | Standard coordinates system in computer vision. Used in OpenCV : see here : http://docs.opencv.org/2.4/modules/calib3d/doc/camera_calibration_and_3d_reconstruction.html |
| SL_COORDINATE_SYSTEM_LEFT_HANDED_Y_UP | Left-Handed with Y up and Z forward. Used in Unity with DirectX. |
| SL_COORDINATE_SYSTEM_RIGHT_HANDED_Y_UP | Right-Handed with Y pointing up and Z backward. Used in OpenGL. |
| SL_COORDINATE_SYSTEM_RIGHT_HANDED_Z_UP | Right-Handed with Z pointing up and Y forward. Used in 3DSMax. |
| SL_COORDINATE_SYSTEM_LEFT_HANDED_Z_UP | Left-Handed with Z axis pointing up and X forward. Used in Unreal Engine. |
| SL_COORDINATE_SYSTEM_RIGHT_HANDED_Z_UP_X_FWD | Right-Handed with Z pointing up and X forward. Used in ROS (REP 103). |
| enum SL_CAMERA_STATE |
| enum SL_MODEL |
| enum SL_MEM |
| enum SL_SENSOR_TYPE |
List of the available onboard sensors.
| enum SL_SENSORS_UNIT |
List of the available onboard sensors measurement units.
| enum SL_SIDE |
| enum SL_REFERENCE_FRAME |
Defines which type of position matrix is used to store camera path and pose.
| enum SL_SENSOR_WORLD |
| enum SL_TIME_REFERENCE |
| enum SL_STREAMING_CODEC |
| enum SL_VIDEO_SETTINGS |
Lists available camera settings for the ZED camera (contrast, hue, saturation, gain...).
| enum SL_MEASURE |
Lists retrievable measures.
| Enumerator | |
|---|---|
| SL_MEASURE_DEPTH | Disparity map. Each pixel contains 1 float. SL_MAT_TYPE_F32_C1. |
| SL_MEASURE_CONFIDENCE | Depth map. In SL_UNIT defined in SL_InitParameters. Each pixel contains 1 float. SL_MAT_TYPE_F32_C1. |
| SL_MEASURE_XYZ | Certainty/confidence of the depth map. Each pixel contains 1 float. SL_MAT_TYPE_F32_C1. |
| SL_MEASURE_XYZRGBA | Point cloud. Each pixel contains 4 float (X, Y, Z, not used). SL_MAT_TYPE_F32_C4. |
| SL_MEASURE_XYZBGRA | Colored point cloud. Each pixel contains 4 float (X, Y, Z, color). The color need to be read as an unsigned char[4] representing the RGBA color. SL_MAT_TYPE_F32_C4. |
| SL_MEASURE_XYZARGB | Colored point cloud. Each pixel contains 4 float (X, Y, Z, color). The color need to be read as an unsigned char[4] representing the BGRA color. SL_MAT_TYPE_F32_C4. |
| SL_MEASURE_XYZABGR | Colored point cloud. Each pixel contains 4 float (X, Y, Z, color). The color need to be read as an unsigned char[4] representing the ARGB color. SL_MAT_TYPE_F32_C4. |
| SL_MEASURE_NORMALS | Colored point cloud. Each pixel contains 4 float (X, Y, Z, color). The color need to be read as an unsigned char[4] representing the ABGR color. SL_MAT_TYPE_F32_C4. |
| SL_MEASURE_DISPARITY_RIGHT | Normals vector. Each pixel contains 4 float (X, Y, Z, 0). SL_MAT_TYPE_F32_C4. Disparity map for right sensor. Each pixel contains 1 float. SL_MAT_TYPE_F32_C1. |
| SL_MEASURE_XYZ_RIGHT | Depth map for right sensor. Each pixel contains 1 float. SL_MAT_TYPE_F32_C1. |
| SL_MEASURE_XYZRGBA_RIGHT | Point cloud for right sensor. Each pixel contains 4 float (X, Y, Z, not used). SL_MAT_TYPE_F32_C4. |
| SL_MEASURE_XYZBGRA_RIGHT | Colored point cloud for right sensor. Each pixel contains 4 float (X, Y, Z, color). The color need to be read as an unsigned char[4] representing the RGBA color. SL_MAT_TYPE_F32_C4. |
| SL_MEASURE_XYZARGB_RIGHT | Colored point cloud for right sensor. Each pixel contains 4 float (X, Y, Z, color). The color need to be read as an unsigned char[4] representing the BGRA color. SL_MAT_TYPE_F32_C4. |
| SL_MEASURE_XYZABGR_RIGHT | Colored point cloud for right sensor. Each pixel contains 4 float (X, Y, Z, color). The color need to be read as an unsigned char[4] representing the ARGB color. SL_MAT_TYPE_F32_C4. |
| SL_MEASURE_NORMALS_RIGHT | Colored point cloud for right sensor. Each pixel contains 4 float (X, Y, Z, color). The color need to be read as an unsigned char[4] representing the ABGR color. SL_MAT_TYPE_F32_C4. |
| SL_MEASURE_DEPTH_U16_MM | Normals vector for right view. Each pixel contains 4 float (X, Y, Z, 0). SL_MAT_TYPE_F32_C4. |
| SL_MEASURE_DEPTH_U16_MM_RIGHT | Depth map in millimeter whatever the SL_UNIT defined in SL_InitParameters. Invalid values are set to 0, depth values are clamped at 65000. Each pixel contains 1 unsigned short. SL_MAT_TYPE_U16_C1. Depth map in millimeter for right sensor. Each pixel contains 1 unsigned short. SL_MAT_TYPE_U16_C1. |
| enum SL_VIEW |
Lists available views.
Lists available object tracking state.
Lists the different states of positional tracking.
Lists the different states of spatial memory area export.
Gives the spatial mapping state.
| enum SL_SPATIAL_MAP_TYPE |
| enum SL_MESH_FILTER |
| enum SL_MESH_FILE_FORMAT |
| enum SL_SENSING_MODE |
Lists available depth sensing modes.
| enum SL_DEPTH_MODE |
Lists available depth computation modes.
| enum SL_FLIP_MODE |
| enum SL_COPY_TYPE |
Lists available compression modes for SVO recording.
SL_SVO_COMPRESSION_MODE_LOSSLESS is an improvement of previous lossless compression (used in ZED Explorer), even if size may be bigger, compression time is much faster.
| enum SL_MAT_TYPE |
List available Mat formats.
| enum SL_OBJECT_SUBCLASS |
Available object subclass, given as hint, when using object tracking an object can change of OBJECT_SUBCLASS while keeping the same OBJECT_CLASS and id (i.e: frame M: MOTORBIKE, frame N:BICYCLE)
| enum SL_DETECTION_MODEL |
List available models for detection.
Lists of supported bounding box preprocessing.
| enum SL_BODY_FORMAT |
Lists of supported skeleton body model.
| enum SL_OBJECT_CLASS |
Lists available object class.

