Simple, easy-to-use ZED X model in a warehouse simulated in NVIDIA Isaac Sim
Stereolabs ZED X camera is our cutting-edge offering tailored for robotic applications. Seamlessly integrating with the ZED X camera, the ZED SDK software stack empowers developers with cutting-edge AI-based computer vision modules, empowering the creation of advanced space-aware applications.
By combining the photo-realistic, high fidelity, simulation of Isaac Sim with Stereolabs’ human-like AI vision, it is possible to accurately create advanced robotics applications entirely in simulation.
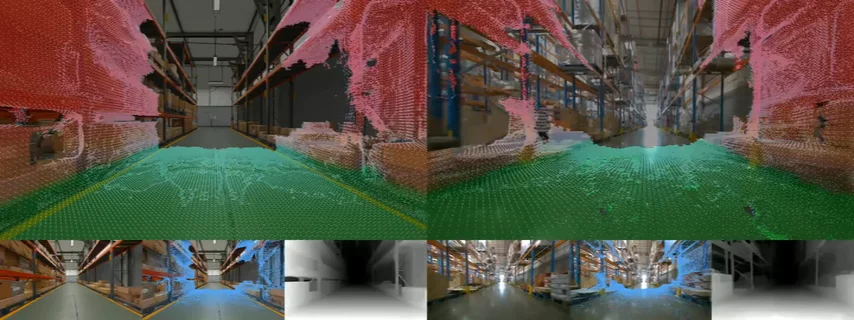
The next video shows how the ZED SDK and ZED X stereo cameras operate within the virtual environment in NVIDIA Isaac Sim platform and how the ZED SDK spatial mapping, depth, and point clouds outputs compare with those from a physical environment.
Stereolabs’ spatial mapping, depth, and point clouds output from a virtual environment (left) compared to a physical one (right)
Watch the full video in high definition
The latest release of Isaac Sim is packed with features to easily develop, test, and train AI robots in the virtual world before deploying them to the real world. The platform also includes Isaac ROS, which brings accelerated computing capabilities to the ROS community and enables the development of next-generation robotics.
At ROSCon 2023, NVIDIA announced the general availability of Isaac ROS 2.0. With this release, Stereolabs ZED cameras can now be integrated into Isaac ROS, making it easier for developers to bring acceleration to their robotics projects.
Finally, the integration enable developers to:
- Safely test robots in real-world conditions: Developers can test ZED SDK-based tasks and applications in a virtual environment and simulate different real-world scenarios, such as navigating obstacles in a warehouse.
- Train AI vision-based robots: As an alternative to physical cameras, developers can use Isaac Sim and ZED SDK integration to train machine learning models using synthetic frames and improve the performance of AI vision-based robots.
- Streamline ROS integration: The integration streamlines the development process for ROS users, because the Isaac Sim extension is compatible with Stereolabs’ ROS 1 and 2 wrappers.
If you want to learn more how Stereolabs Accelerates Smart Robot Navigation with NVIDIA Isaac Integration, read our press release.
Stay tuned for the official release of the ZED Camera Extension for Isaac Sim