Body Tracking with ROS 2
The ROS 2 wrapper offers full support for the Body Tracking module of the ZED SDK.
The Body Tracking module can be configured to use one of the available detection models:
| MODEL | Description |
|---|---|
HUMAN_BODY_FAST | Keypoints based, specific to human skeleton, real time performance even on NVIDIA® Jetson™ or low end GPU cards |
HUMAN_BODY_MEDIUM | Keypoints based, specific to human skeleton, compromise between accuracy and speed |
HUMAN_BODY_ACCURATE | Keypoints based, specific to human skeleton, state of the art accuracy, requires powerful GPU |
The Body Tracking module can be configured to use one of the available body formats:
| FORMAT | Description |
|---|---|
BODY_18 | 18 keypoints model. Basic Body model |
BODY_34 | 34 keypoints model. Body model, requires body fitting enabled |
BODY_38 | 38 keypoints model. Body model, including feet simplified face and hands |
The result of the detection is published using a new custom message of type zed_interfaces/ObjectsStamped defined in the package zed_interfaces.
Enable Body Tracking #
Body Tracking can be started automatically when the ZED Wrapper node starts by setting the parameter body_tracking.bt_enabled to true in the file common.yaml.
It is also possible to start the Body Tracking processing manually by calling the service ~/enable_obj_detwith the parameterTrue`.
In both cases, the Body Tracking processing can be stopped by calling the service ~/enable_obj_detwith the parameterFalse`.
See the services documentation for more info.
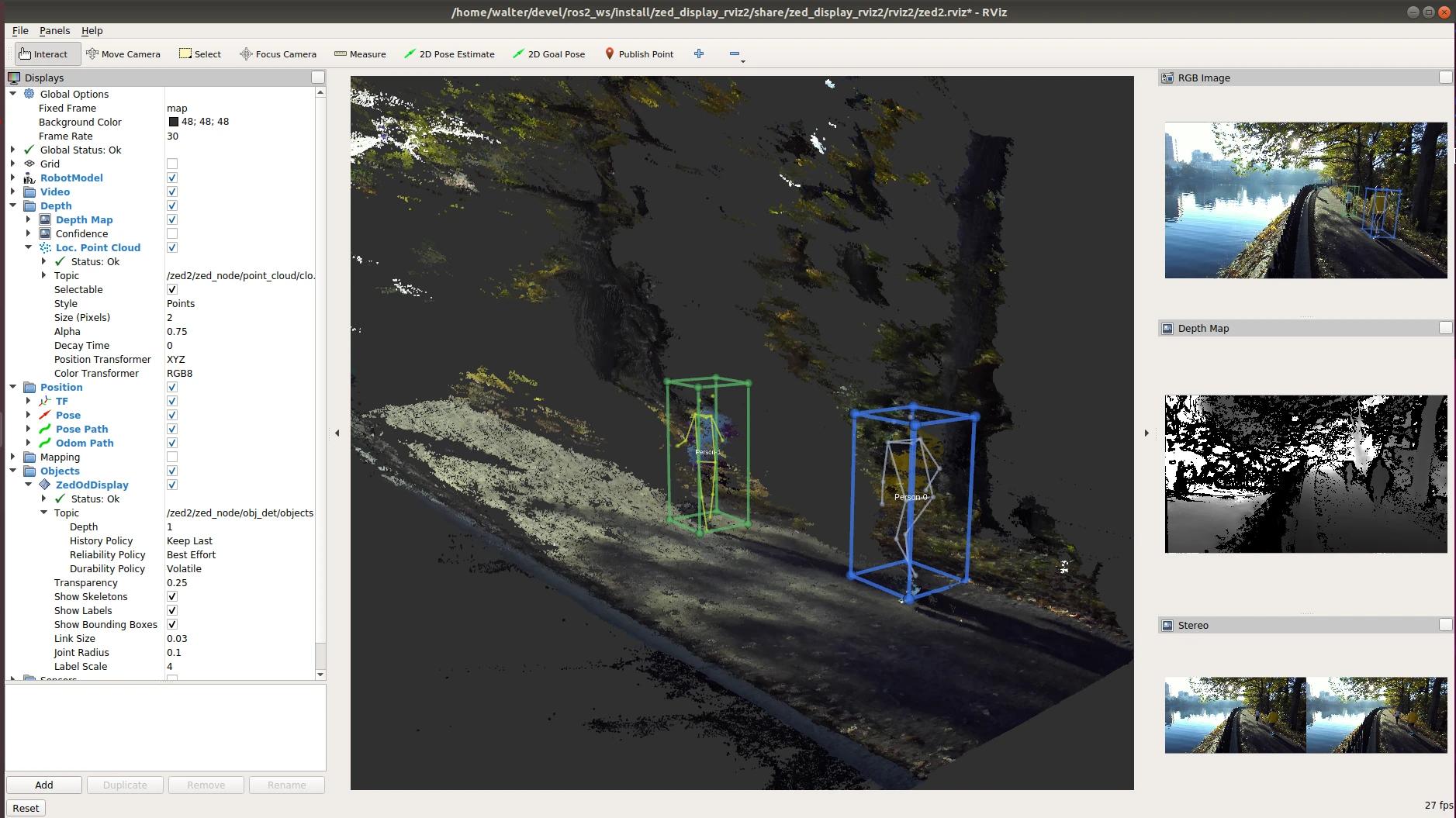
Body Tracking results in RVIZ 2 #
To visualize the results of the Body Tracking processing in Rviz2 the new ZedOdDisplay plugin is required. The plugin is available in the zed-ros2-examples GitHub repository and can be installed following the online instructions.
📌 Note: the source code of the plugin is a valid example about how to process the data of the topics of type zed_interfaces/ObjectsStamped.

Parameters:
Topic: Selects the body tracking topic to visualize from the list of available images in the combo box.Depth: The depth of the incoming message queue.History policy: Set the QoS history policy.Keep Lastis suggested for performance and compatibility.Reliability Policy: Set the QoS reliability policy.Best Effortis suggested for performance and compatibility.Durability Policy: Set the QoS durability policy.Volatileis suggested for compatibility.Transparency: the transparency level of the structures composing the detected bodies.Show skeleton: enable/disable the visualization of the skeleton of the detected persons.Show Labels: enable/disable the visualization of the label.Show Bounding Boxes: enable/disable the visualization of the bounding boxes of the detected bodies.Link Size: the size of the bounding boxes’ corner lines and skeleton link lines.Joint Radius: the radius of the spheres placed on the corners of the bounding boxes and on the skeleton joint points.Label Scale: the scale of the label of the bodies.